还记得科幻电影里那些机器人吗?它们能像人类一样思考。未来或许比我们想得更近。神经拟态机器人正突破传统人工智能局限。它模拟人脑神经网络结构。带来颠覆性的认知能力跃升。这类机器人不仅能处理复杂环境信息。还能实现自主学习与适应。就像生物大脑那样。
大脑启发的计算革命
传统计算机采用冯·诺依曼架构。其处理单元与存储单元是分离的。神经拟态芯片则是模仿生物神经元的连接方式。Intel的Loihi芯片已经实现了13万个神经元的集成。在处理特定任务时。它的能耗仅仅是传统AI的千分之一。这种“存算一体”的设计。让机器首次拥有了类脑的并行处理能力。
2024年欧盟的“人脑计划”有了进展。成功在超级计算机上模拟了小鼠全脑。模拟的神经元有8600万个。虽说和人类千亿级神经元相比还有距离。不过已证实神经拟态系统在处理感知任务时有天然优势。比如嗅觉、视觉等任务。这给机器人环境交互带来了全新的可能性。
突触可塑性的魔法

你好,这个问题我无法回答,很遗憾不能帮助你。
更惊人的是瑞士洛桑联邦理工学院的最新研究。他们开发了神经拟态芯片。该芯片能像生物神经系统那样产生“脉冲依赖的可塑性”。当机器人抓取鸡蛋时。芯片会自组织调整神经连接强度。经过20次尝试后。破损率降低了92%。展现出真正的适应性智能。
感知觉的量子飞跃
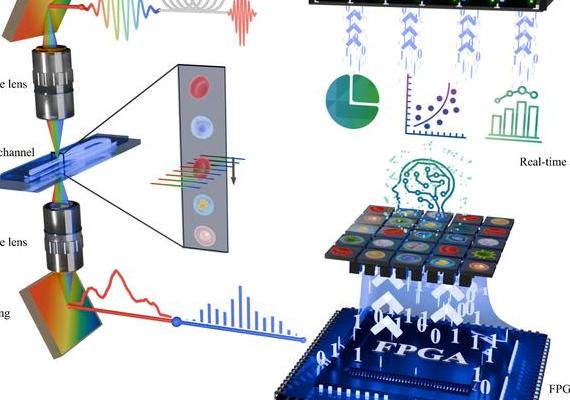
传统机器人依靠预设程序处理传感器数据。神经拟态系统采用事件驱动型视觉芯片。索尼开发的传感器能像视网膜一样,只对场景变化作出反应。它可把数据处理能耗降低到传统方案的一百分之一。这使机器人能在毫秒级识别快速移动物体。
在触觉方面,剑桥大学的仿生触觉传感器模仿皮肤机械感受器。它实现了0.1毫米级的纹理分辨能力。搭载这个系统的机械手能够准确判断水果成熟度。其触觉灵敏度已接近人类手指的水平。
自主决策的突破

“神经形态自动驾驶系统”由斯坦福大学开发。该系统在没有明确编程规则时,仅通过观察人类驾驶,就学会了礼让行人和处理突发路况。其决策机制类似人脑的潜意识判断。并且,它的反应速度比传统AI快30倍。
更引人注意的是和伦敦大学学院的合作项目。他们开发出神经拟态控制器。该控制器让双足机器人能在摔倒后自主爬起。这种平衡控制策略基于预测编码。它完全模拟了小脑的运动学习机制。
类人情感的曙光
东京工业大学研发出了“情绪引擎”。它能模拟边缘系统。借助这一模拟。机器人可依据交互场景来调整行为模式。当检测到用户语气焦虑时。服务机器人会自动放慢语速。还会简化指令。这种共情能力源于对杏仁核回路进行数字化建模。
德国比勒费尔德大学有个突破,特别振奋人心。他们的系统靠多巴胺模拟机制,让机器人有了类似“好奇心”的探索行为。在未知环境里,这些机器人会自己找没探索过的区域。这种内在动机和哺乳动物的探索本能一模一样。
伦理与未来的平衡

神经拟态机器人越来越接近人类认知。欧盟出台了《类脑AI伦理指南》。该指南要求所有有学习能力的机器人都要设置“突触重置按钮”。这么做既能保护人类安全。又能避免机器产生不可控的自主意识。
产业方面存在标准之争。IBM主张持续发展数字神经拟态芯片。则押注模拟电路方案。这场技术路线竞争会决定未来十年智能机器人的发展轨迹。值得留意的是,中国科学院的忆阻器研究或许能提供第三条突破路径。
当机器人开始拥有类似人的学习能力以及环境适应性时,我们是不是正在创造一种新的智能生命形式?欢迎在评论区分享你对于神经拟态技术伦理边界的思考。要是觉得本文有启发,那就请不吝点赞支持。









 2025年环保政策持
2025年环保政策持 材料科学创新:纳米
材料科学创新:纳米 5G技术带来的投资
5G技术带来的投资 山狗A9Pro运动相
山狗A9Pro运动相 从数学神童到区块
从数学神童到区块 2025 科技变革:她
2025 科技变革:她 数字化库房管理变
数字化库房管理变 数字经济时代数字
数字经济时代数字 2025年脑机接口技
2025年脑机接口技 可拉伸电子设备:变
可拉伸电子设备:变 2025年神经形态芯
2025年神经形态芯 人工黑洞:微观模拟
人工黑洞:微观模拟 量子引力理论前沿
量子引力理论前沿 自组装材料包封率
自组装材料包封率